
لطالما نظر الإنسان للمخلوقات الطبيعية من حوله محاولًا فهمها واستخلاص مبادئها في عقله لينشئ منها أدوات وآلات مسخرة لخدمته، فاستلهم الطائرات من الطيور والغواصات من الأسماك، ولكن هل حان الوقت لينظر الإنسان إلى نفسه وطبيعة عقله ليستلهم من تكوينه مفاهيمًا وآلياتٍ يسخرها كيفما يشاء؟ لعل العقل البشري وتركيبه من العجائب التي أذهلت العلماء والفلاسفة، فهو المسؤول عن الأفكار والخيال وموطن الذكريات والمشاعر، ولكن ما نحن بصدده هذا المقال هو تمثيل العقل بهيئة حاسوب فائق، يتميز هذا الحاسوب -أي العقل- بقدرته على حل مشكلات بالغة التعقيد لم تطرأ عليه قبلًا، فإن كنت على الطريق وحدث ثقب في إطار سيارتك فلن تبذل الكثير من التفكير لتوقف سيارتك على جانب الطريق وتبدأ في تغيير إطارك، لعلك تطلب مساعدة من أحد المارة، إن لم تكن تملك الوقت الكافي لهذا يمكنك أخذ سيارة أجرة لوجهتك، فرغم مقابلتك للعديد من المشكلات التي ربما لم تكن معتادًا على مقابلتها، فقد استطعت التصرف بشكل يناسب أهدافك ويوصلك لوجهتك، وهذه القدرة الفائقة على التأقلم في العديد من المواقف ألهمت الباحثين في علم الروبوتكس (robotics) للأخذ مما تطرحه علوم الأعصاب.
هناك العديد من الأوجه الواجب اعتبارها عند تصميم إنسان آلي قادر على القيام بوظيفة محددة، فبداية يجب أن يصمم جسد هذا الإنسان الآلي بشكل يتناسب مع وظيفته، فإن كان مطلوب منه أن يمسك كوبًا من الماء فيجب أن يمتلك يدًا ليمسك بها، وثانيًا يجب أن يتملك مستقبلات حسية – عينين في هذه الحالة- ليدرك أين كوب الماء من حوله، ثالثًا عليه أن يحمل نظام تحكم يخبر الروبوت ليمد يده أينما وجد كوب الماء، وكل عنصر من هؤلاء يُصمَّم ويُلقَّحُ تصميمه على حدة، ومن ثمَّ تُدمَج معًا هذه العناصر لإنتاج روبوت يمسك كوب الماء حين يراه، ولكن تواجه هذه الطريقة -أي تصميم كل جزء على حدة- معضلة حين يزداد السلوك المراد تعقيدًا وصعوبة في تنفيذه، فلربما يختلف شكل الكوب من مكان إلى مكان، ، لربما وُجِدت عوائق بين الإنسان الآلي وبين الكوب المراد إمساكه بتغير البيئة المحيطة، في الحقيقة أن هناك العديد من الاحتمالات التي يجب دراستها و فحصها أثناء عملية التصميم، مما يضع عبءً أكبر على المصمم وفرصة نجاحٍ أقل لهذا الروبوت.
لا داعي للمقارنة بينك أيها القارئ وبين هذا الروبوت السالف ذكره، انظر حولك فإن رأيت كوب ماء أو قلمًا أو أي شيء آخر يمكنك إمساكه فأمسكه، لن تجد صعوبة في ذلك ولتجد الأمر تم بانسيابية تامة، ورغم ذلك لم ينشأ كل جزء منك بمعزل عن الآخر، فحواسُّك وعقلك و جهازك الحركي لم ينشأ أيٌ منهم في غرفة مظلمة وحده دون الآخرين، ذلك جذب أنظار علماء الحاسوب والمصممين إلى كيفية نشوء هذا المخ، ذكرنا سابقًا امكانية اعتبار المخ حاسوبًا فائقًا، وذكرنا أن سر تفوقه هو قدرته على التأقلم في المواقف الجديدة التي يقابلها، فإن نشأ هذا العقل بهيئته تلك عبر ملايين السنين من التطور، حيث أن البشر الأقدر على التأقلم وإصدار السلوك المناسب في الموقف المناسب ( كالهرب عند مواجهة كائن مفترس) استطاعوا النجاة ناقلين لنا قدرتهم الذهنية تلك، فهل يمكننا استغلال مفاهيمنا عن نظرية التطور وتطبيقها على الإنسان الآلي؟
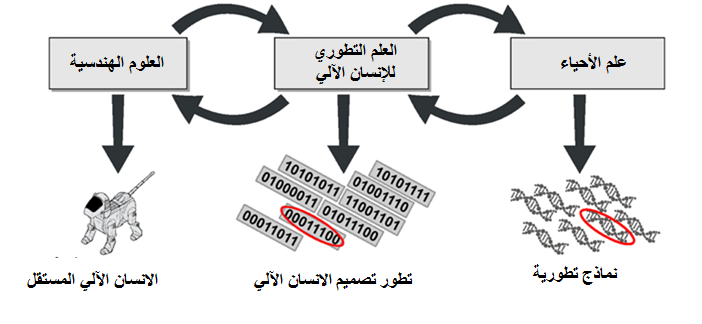
من هذا المنطلق نشأ علم الروبوتات التطوري (evolutionary robotics) على يد ثلاثة باحثين من جامعة ساسكس (Sussex) عام 1993 مؤسسين بحثهم على العديد من الأبحاث و النماذج في مجال البرمجة والتي نهلت من المفاهيم التطورية القادرة على إنتاج أنظمة حية كالعقل البشري قادرة على حل المشكلات التي تقابلها، فيتم تصميم عدد من النماذج المبدأية مختلفة التركيب للروبوت ويتم إطلاقها في بيئة ما ليتحركوا فيها كيفما يستطيعون محاولين إمساك كوب الماء، ومن ثَمَّ يتم تقييم سلوك كل روبوت أثناء فترة حركته حسب كفاءته (كم مرة نجح الروبوت في إمساك كوب الماء حين رآه وكم مرة استطاع تحديد الطريق الخالي من العوائق إلى هذا الكوب؟)، وبعد تحديد الروبوتات الأكثر كفاءة في هذا الجيل يمكننا جعلها تتناسخ وتتكاثر إلى جيل جديد والقيام ببعض التعديلات عليها بشكل يقارب انتقال الجينات من جيل إلى جيل عبر التكاثر الجنسي واللاجنسي فيما يعرف بالخوارزمية الجينية، ومن ثم تركها في نفس البيئة لتقوم بنفس السلوك، ومن ثم نختار الأصلح من هذه الروبوتات أيضًا و نعيد تكاثرها وإضفاء تعديلات بسيطة عليها، وفي النهاية -بعد اختيار الأصلح ثم الأصلح من كل جيل- ينتج لنا روبوت منتقى عبر أجيال عديدة قادر على القيام بالوظيفة المطلوبة منه بعناية (ملاحظة: ذكرنا الخوارزميات الجينية كإحدى وسائل التعلم الآلي لتعزيز فهم التقارب بين المسار البيولوجي ومسار تطوير برمجيات الانسان الالي، غير أن التعلم الآلي لا يقتصر على هذه الخوارزمية بل يشتمل على خوارزميات وطرق أخرى أبرزها الشبكات العصبية الاصطناعية والتي تعد هي الاخرى أحد أركان هذا التقارب).
رغم كل ذلك، ففي كل خطوة في خطوات صناعتنا لروبوت متطور يسير حوار بين إمكانياتنا الهندسية وفهمنا لنظرية التطور نفسها التي أخذنا منها تطبيقنا هذا، فبداية حين صممنا نماذجنا الابتدائية من هذه الروبوتات، من يخبرنا أنها لن تفشل جميعها في إمساك الكوب؟ كيف لنا أن نختار الأصلح حينها وقد فشلت جميعها في تنفيذ الوظيفة المطلوبة؟ تعرف هذه المعضلة باسم (bootstrap problem)، وفي الحقيقة أن لديها عددًا من الحلول، فمثلًا يمكن أن يتدخل المصمم في عملية التطور تلك، محاولًا توجيه روبوتاته نحو الهدف المطلوب شيءً فشيءً عبر تقسيمه لأهداف أبسط يمكن للروبوت تحقيقها، ولكن يوجد حل آخر يمكُّننا من فك هذه المعضلة دون أي تدخل بشري، الحل المقصود هنا يسمى بالتطور المشترك (Co-evolution)، تحديدًا ما يحدث بين الكائن الصياد والفريسة، فأي تغير عند الصياد يشكل تهديدًا للفريسة فتتطور لتواجه هذا التهديد، وأي تغير في الفريسة -بالمثل- يشكل تحديًا للصياد عليه أن يواكبه، وفي الحقيقة أنه في بعض المواقف يحقق التطور المشترك لنوعين من الروبوتات -واحدًا ممثلًا دور الفريسة وواحًدا ممثلًا الصياد- نجاحًا أكبر بالمقارنة بنوع واحد يريد تحقيق نفس المهمة.
ومن أهم الأسئلة التي يطرحها علم الروبوتات هو كيفية ضمان قدرة الإنسان الآلي على التطور؟ كيف لا يحدث تغيرٌ بين جيل لجيل يؤدي لعرقلة الوظيفة المراد تأديتها أو منعها تمامًا في هذا الجيل؟ وتأتي الإجابة مرة أخرى من طريقة تركيب الكائنات الحية، يحمل أي كائن الحي مادة وراثية تسمى الجينات (genes)، تحمل هذه الجينات المعلومات عن تركيب كل الكائن الحي، فيحمل كل جين صفة أو أكثر من صفات هذا الكائن، فإن حدث تغير في إحدى الجينات فلن يؤثر ذلك إلا على الصفة المسؤولة عنها، فمثلًا إذا حدثت طفرة في الجين المسؤول عن لون الشعر أو حجم الفك، لن يتغير شيء في الجسد غير لون الشعر وحجم الفك، غير مؤثرة على باقي أجزاء الجسد ووظائفه الحيوية، هذا النموذج يسمى بال (genotype-phenotype mapping)، أي أن كل صفة في هذا الكائن تعود إلى جين محدد، وما يطرحه ذلك هو قدر من الاستقرار أثناء تطور الكائنات الحية، فليس كل تغير يطرأ عليها يؤدي إلى تغيرها جذريًا مما قد يؤدي إلى تعريضها للخطر من الطبيعة حولها، ويمكننا أخذ هذه الفكرة و تطبيقها على إنساننا الآلي بحيث لا تطرأ تغيرات جذرية تؤدي إلى توقفه عن العمل وبالتالي منعه من التكاثر (أو تحديداً التطور في النموذج).
يزيل لنا هذا النموذج وهذه الأفكار المطروحة الكثير من العوائق التي واجهناها في بداية المقال، فالآن ليس المصمم مطالبًا بتوقع كل مشكلة قد تقابل إنسانه الآلي أثناء عمله وليس مطالبًا بتصميم كل جزء من الإنسان الآلي على حدة حيث أن عملية التطور تلك تعمل على جميع أجزاءه في آن واحد، ولكنها أيضًا تبين لنا آفاقًا أخرى في مجال الهندسة بل مجال الأحياء التي استمدت منه فكرتها من الأساس.
تتطور الكائنات الحية على آلاف وملايين والسنين، مما يجعل مراقبة تطورها ودراسته دراسة مباشرة أمرًا صعبًا، فيلجأ العلماء للسجل الأحفوري و المعلومات الجينية للكائنات الحية لدراستها والمقارنة بينها، ولكن وجود نماذج مثل هذه الروبوتات القادرة على التطور يمنحنا فرصة لمحاكاة الأنظمة الحيوية بدقة أعلى وإمدادنا بفرص تجريبية لدراسة فرضياتنا حول التطور، فقام – على سبيل المثال- باحثون من جامعة لوزان (Lausanne) بخلق 100 مجموعة كل منها مكونة من 20 روبوت لدراسة تأثير التطور على قدرة الكائنات الحية على التواصل فيما بينها ومراقبة اختلاف انظمة التواصل تلك بين الأجيال المختلفة وعلاقتها بالتغيرات الجينية التي سبقتها وعلاقة ذلك بالانتخاب الجنسي (قدرة الكائن على التزاوج لإنجاب أكبر عدد من الأفراد) والانتخاب الطبيعي (قدرة الكائن على التغلب على الأخطار الطبيعية التي تقابله)، وليس هذا البحث الوحيد من نوعه، حيث استخدمت نفس التقنية في دراسة سلوك التعاون بين الكائنات الحية وغيرها من السلوكيات التي لم يسهل لنا دراستها نظرًا لندرة آثارها في السجل الأحفوري.
في هذا المقال ملنا كثيرًا نحو علم الأحياء التطورية وما يحمله علم الروبوتات له، ورغم النافذة المميزة التي ينظر منها هذا العلم بأدواته إلى علوم التطور والسلوك، فإن ذلك لا ينفي قط التطبيقات الواعدة لعلم الروبوتات التطوري في مجال الهندسة والتصميم، فهو بطبيعته يسعى لإيجاد التصميم الأفضل الذي يقوم بالوظيفة المطلوبة، حاملًا عبء إيجاده عن المصمم، على سبيل المثال نجح علماء من جامعة كوينزلاند (Queensland) الأسترالية العام الماضي بتحديد أفضل نموذج لقدم روبوت عند السير على أسطح مختلف التركيب سواء ماء او تربة أو غيرها.
علم الروبوتات التطوري رغم حداثة تكوينه إلا أنه يقتبس العديد من الأفكار والاقتراحات من علوم التطور و البرمجيات على سواء محاولًا الإضافة عليها و استغلالها لمسعاه واعدًا بتطبيقاته نافذة جديدة لعلوم الأحياء والسلوك والتصميم، رغم ذلك فلا زال قيد نمو، ولم يملك أحدٌ أن يتنبأ بمستقبله و تطبيقاته، فلربما يكون هو مستقبل دراسات السلوك البشري إن طورناه بما يكفي.
المصادر:
- Floreano , S. Nolfi; “Evolutionary Robotics: The biology, Intelligence, and Technology of Self-Organizing Machines”; MIT perss; https://mitpress.mit.edu/books/evolutionary-robotics
- Donciex, N. Bredeche, J. Mouret & A.E. Eiben; “Evolutionary Robotics: What, why, and where to”; Frontiers in Robotics and AI Journal; 03 March 2015; https://doi.org/10.3389/frobt.2015.00004
- Cliff, Harvey I. and Husbands P. (1993). Explorations in evolutionary robotics. Adaptive Behavior, 2:73-110; https://doi.org/10.1177/105971239300200104
- Floreano, D., Mitri, S., Magnenat, S., and Keller, L. (2007). Evolutionary conditions for the emergence of communication in robots. Curr. Biol. 17, 514–519. doi:10.1016/j.cub.2007.01.058
- Collins, W. Geles, D. Howard & F. Maire; “Towards the Targeted Environment-specific Evolution of Robot Components”; https://arxiv.org/abs/1810.04735